自动驾驶汽车是依靠人工智能、视觉计算、激光雷达、监控装置和全球定位系统协同合作,让电脑可以在没有人类主动的操作下,自动、安全地操作机动车辆,其主要由环境感知系统、定位导航系统、路径规划系统、速度控制系统、运动控制系统、中央处理单元、数据传输总线等组成。
自动驾驶汽车在传统汽车的基础上扩展了视觉感知功能、实时相对地图功能、高速规划与控制功能,增加了全球定位系统天线、工业级计算机、GPS 接收机、雷达等核心软硬件。感知环节通过各种传感器采集周围环境基本信息,是自动驾驶的基础,主要包括毫米波雷达、激光雷达、超声波传感器、图像传感器等。
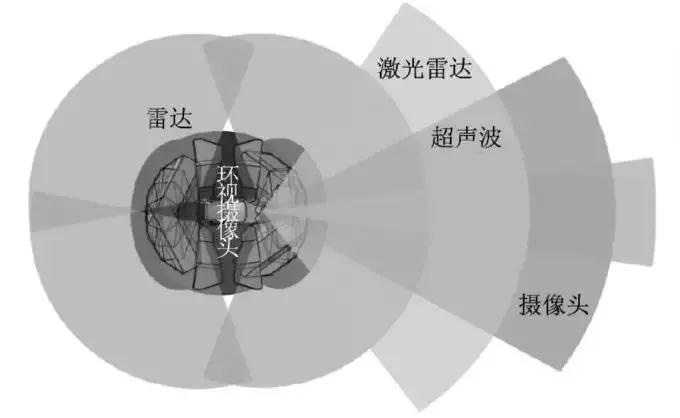
4种传感器感知范围示意图
4种传感器及其产业链介绍
毫米波雷达
ADAS系统(高级辅助驾驶系统)需要雷达传感器的支持,而雷达也是实现自动驾驶功能的一大功臣。毫米波雷达利用无线电波对物体进行探测和定位。
现在的雷达系统主要有用于中短测距的 24 GHz 雷达和长测距的 77 GHz 雷达 2 种,其中 77 GHz 的优势主要在于距离和速度测定的准确性,此外其角分辨率也更加精准。毫米波雷达可有效提取景深及速度信息,识别障碍物,有一定的穿透雾、烟和灰尘的能力,但在环境障碍物复杂的情况下,由于毫米波依靠声波定位,声波出现漫反射,导致漏检率和误差率比较高;
固态雷达芯片系统很常见,体积小,价格低廉。它们具有良好的范围,但比其他传感器的分辨率更差。它们在明暗条件下同样工作良好,77 GHz系统能够更好地感知雾,雨和雪,这会导致激光雷达和被动视觉系统的挑战。
雷达无法进行颜色,对比度或光学字符识别。雷达在确定当前实施中的交通相对速度方面非常有效。虽然传感器尺寸使其更接近近距离探测,但它们在极短距离内的效率低于声纳。
产业链
目前,全球毫米波雷达市场主要由博世、大陆、天合汽车集团、法雷奥、海拉、德尔福、电装、奥托立夫、富士通等厂商主导,其中法雷奥、海拉和博世占据我国 24 GHz 雷达市场 60% 以上的出货量,德国大陆、博世和德尔福占据我国 77 GHz 雷达市场 80% 以上的出货量。
中国毫米波雷达技术产业创新加速,24 GHz 毫米波集成电路已实现规模量产。芜湖森思泰克智能、杭州智波、华域汽车等实现了 24 GHz 毫米波雷达的批量生产,沈阳承泰、湖南纳雷、南京隼眼电子、北京行易道、华域汽车、上海保隆汽车、苏州安智汽车等均完成了 77 GHz 雷达的样机测试,部分公司有望于 2019-2020 年实现规模量产。
但由于供应链与知识产权等限制,国际毫米波雷达芯片商对中国并没有完全放开 77 GHz 雷达芯片的供应,极大程度地限制了国内 77 GHz 毫米波雷达的研发及产业化。此外,考虑到雷达产品稳定性需要长期、大规模生产经验的积累,国产技术产业全面突破仍面临生产工艺等多方面的挑战。
激光雷达
激光雷达依靠是激光而不是无线电波。除了激光发射器,这套系统还需要一个敏感的接收器。激光雷达系统能探测静态和动态物体,并提供被探测物的高分辨率的几何图像、距离图像、速度图像。
激光雷达目前是大而昂贵的系统,必须安装在车辆外面。分单线和多线激光雷达,多线激光雷达可以获得极高的速度、距离和角度分辨率,形成精确的 3D 地图,抗干扰能力强,是智能驾驶汽车发展的最佳技术路线,但是成本较高,也容易受到恶劣天气和烟雾环境的影响;
目前的实施方案已经基本上从早期的30米范围到150米到200米改进了范围,同时分辨率也提高了。
激光雷达在所有光线条件下都能很好地工作,但由于使用了光谱波长,它们开始因空气中的雪,雾,雨和尘埃颗粒的增加而失效。激光雷达无法检测颜色或对比度,也无法提供光学字符识别功能。
在汽车行业,激光雷达是个相对较新的系统,正越来越受欢迎。
谷歌的自动驾驶汽车解决方案使用激光雷达作为主要传感器,但也使用其他传感器。特斯拉目前的解决方案并未包含激光雷达(虽然姊妹公司SpaceX确实如此)以及过去和现在的声明表明他们认为自动驾驶汽车不需要。
眼下,激光雷达已经不是什么新鲜玩意,任何人都能从商店抱一台回家,且精确度能满足一般需要。不过,想让它克服一切环境因素(温度、太阳辐射、黑夜、雨雪天)稳定工作并不容易。此外,车载激光雷达还得能看 300 码(约合 274 米)远。最重要的是,这样的产品必须能以市场可接受的价格和体积进行大规模量产。
激光雷达在工业和军事领域已经应用。不过,它毕竟是一种拥有 360 度全景视角的复杂机械透镜系统。由于单个成本高达数万美元,因此激光雷达暂时还不适合在汽车产业大规模部署。
产业链
目前,车载激光雷达产品研发及生产厂商主要集中在国外厂商,美国 Velodyne 激光雷达技术研发及产业化进程相对领先,拥有包括 HDL-64E、HDL-32E 和 VLP-16 3 个系列在内的多条产品线,已经和 25 个无人驾驶汽车项目达成合作协议,客户覆盖百度、福特、谷歌、日产、沃尔沃等;其他厂商如美国德尔福、德国大陆、德国英飞凌(Infineon)、以色列 Oryx Vision、美国 Blackmore、美国TetraVue、美国 Cepton、加拿大 Leddartech、美国 Quanergy、以色列 Innoviz 等技术竞争实力相对较强,在不同产品领域均占据一定份额。
国内代表厂商包括北科天绘、禾赛科技、镭神智能、北醒光子、速腾聚创、光珀智能等,均大力研发布局车载激光雷达产业,以北科天绘为例,拥有 18 年的激光雷达技术积累,采用完全自主研发的芯片和半导体工艺,率先实现高端激光雷达装备规模量产。
目前,我国激光雷达产业链的整体发展水平还存在一定差距,激光雷达主要由激光光源、探测器和信息处理器组成,光源、探测器部分核心部件分别是激光二极管和雪崩二极管,目前国内激光二极管产品基本依赖进口,雪崩二极管有一定产业基础但对外依存度依然较高。
超声波传感器
超声波传感器主动发出高于人类听觉水平的高频声音。它们具有非常差的范围,但是对于非常近距离的三维映射非常好,因为声波相对较慢,因此可以检测到一厘米或更小的差异。
无论光照水平如何,由于距离短,它们都可以在雪,雾和雨的条件下同样良好地工作。与激光雷达和雷达一样,它们不提供任何颜色,对比度或光学字符识别功能。由于它们的射程短,因此无法用于测量速度。它们小而便宜。
超声波传感器主要应用于短距离场景下,如辅助泊车。结构简单、体积小、成本低是它的优势。
超声波传感器是利用超声波的特性,将超声波信号转换成其它能量信号的传感器,具有频率高、波长短、绕射现象小等特点,对液体、固体的穿透性较强,用于自动驾驶汽车可帮助车辆探测外部环境并指导车辆对此做出适当的反应。超声波传感器初期主要用于车辆制动辅助系统和倒车雷达,用来检测障碍物避免碰撞和擦蹭,目前已被研究应用在自动泊车和自动刹车系统。
一是自动泊车辅助系统利用超声波传感器提供的停车区信息和车辆位置,控制汽车油门、制动器和转向,从而完成车库停车和侧方位自动泊车。泊车传感器通过声纳技术来计算与目标物体的距离或方向,汽车制造商通过在后保险杠上安置 2~4 颗传感器来部署自动泊车系统,这样可以确保探测距离在 2~2.5 m 之间,并将测量到的距离用蜂鸣声传达给驾驶员。
二是超声波自动刹车系统是通过松开油门踏板、同时采取制动来避免前侧碰撞,放置在汽车车头的超声波传感器会发射超声波,在接收到前面物体的反射波后确定汽车与物体之间的距离,进而通过伺服电机自动控制汽车制动系统。
产业链
车用超声波传感器市场较为分散,国际厂商主导地位显著。目前,全球车用超声波传感器市场主要由Bosch,Valeo,Murata和SensorTec等主导,国内尚无具有较强竞争力的大型专业设计和制造厂商。
图像传感器(摄像头)
近年来,相机图像识别系统变得非常便宜,小巧且高分辨率。它们的颜色,对比度和光学字符识别功能为其提供了一个全新的功能集,完全没有其他所有传感器。它们具有最佳的传感器范围,但光线条件良好。它们的范围和性能随着光线水平变暗而降低,开始依赖于 - 就像人眼一样 - 依赖于汽车前灯的光线。
通过对采集图像进行计算机算法分析,车载摄像头能够识别行人、自行车、机动车、道路轨迹线、路牌、信号灯等环境信息,进而支撑实现车道保持辅助、车道偏离预警、前向碰撞预警、行人碰撞预警、全景泊车、驾驶员疲劳预警等功能。
产业链
我国在车载摄像头镜头、模组等方面具备较好基础,在图像传感器、DSP 方面对外依存度较高:
一是国内拥有以大立光学、舜宇光学、玉晶集团、亚洲光学、利达光电、关东辰美、先进光电、威海世高光电子、深圳市理念光电、江西兴邦光电、深圳精龙达光电、东莞新旭光学、水晶光电等为代表的车载摄像头镜头元件提供商,突破了模压玻璃非球面技术、精密变焦凸轮设计技术、多层宽带增透镀膜技术、超低色散光学玻璃技术等高精密加工工艺,技术水平与日本电波、蔡司、三星、LG、夏普等国际厂商基本相当。
二是拥有以同致电子、深圳豪恩、苏州智华、欧菲光等为代表的模组厂商,可提供车载级安全要求的摄像头模组产品。
三是拥有格科微、思比科等图像传感芯片处理企业,在 CMOS 图像传感上具备一定技术基础,但在高像素演进和单像素尺寸微缩方面与索尼、三星仍存在较大差距,高端产品仍存在严重技术依赖。
国际上主要由索尼、Delphi、霍尼韦尔、东芝、Mobileye等国际厂商供货,国内仍存在较大的提升空间。
多传感器融合是主要方向
虽然说自动驾驶在全球范围内已经形成风潮,并有望在2021年实现4级自动驾驶,但是其想要真正走入现实也并非易事。从技术方面而言,目前自动驾驶的痛点在于稳定可靠的感知及认知,包括清晰的视觉、优质的算法、多传感器融合以及高效强大的运算能力。其中,多传感器融合是实现自动驾驶的必然发展趋势。
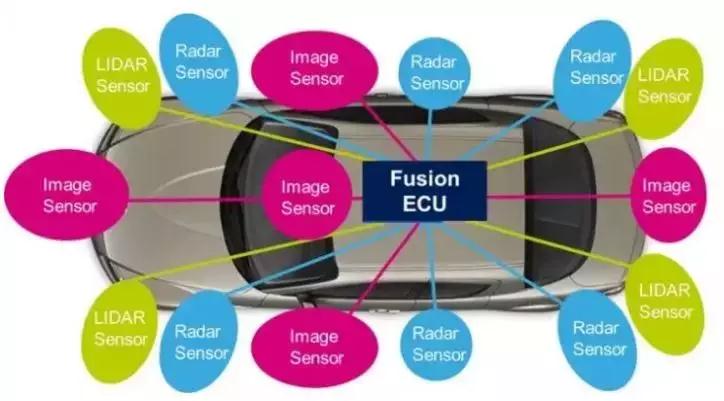
自动驾驶汽车需要用到多种传感器
具体而言,多传感器融合就是将多个传感器获取的数据、信息集中在一起综合分析以便更加准确可靠地描述外界环境,从而提高系统决策的正确性。虽然在原理上看似简单,但是在自动驾驶场景中则显得充满挑战。多传感器融合,需要对每个传感器采集的信息进行快速处理,从而让高速行驶的汽车及时进行反馈动作,以应对突发的交通情况。由此可见,多传感器融合并不仅仅是硬件方面的协同配合,还包括决策层的算法和算力支持。
当前,自动驾驶环境感知技术路线主要包括视觉主导和激光雷达主导两种方案:
一是以特斯拉为代表的「摄像头 + 毫米波雷达 + 超声波雷达」多传感器融合,Autopilot 2.0 硬件由 8 个摄像头、1 个毫米波雷达和 12个超声波雷达组成,但摄像头受环境光照影响较大,目标检测较不可靠,优势是成本相对较低;
二是以 Google Waymo 为代表的「低成本激光雷达 + 毫米波雷达 + 超声波传感器 + 摄像头」多传感融合,激光雷达是主动视觉,目标检察较为可靠,但缺少颜色和纹理信息且成本较高。
目前,没有一种解决方案是完美的,每种组合解决方案都有妥协,即使这些妥协的规模或不同方向的意识程度不同。这些传感器技术将以不同的方式在不同的车辆价格点组合,从而获得更有效的解决方案。
文章转载自:iot101