新一代汽车是未来市场的一大支柱,消费者关注的不仅仅是高性能的电动汽车和混合动力车,近年来,智慧出行概念以及新一代智能网联汽车也备受关注。
所谓智能网联汽车,是指通过搭载先进装置收集车体状态和路面状态的各种信息,融合通讯技术来提高驾驶安全性的汽车类型。
也就是说,未来的汽车要能够眼观六路、耳听八方。
推动智能网联、驾驶全自动化的核心技术被简称为V2X:
-
车辆间通讯(V2V:Vehicle to Vehicle)
-
车辆与基础设施通过网络实现互相通信(V2I: Vehicle to Infrastructure)
V2X技术构建高效的交通系统,能快速获得即时路况,更能有效地防止交通事故等,实现最高阶的完全自动化驾驶(ADAS)。
下面就为你介绍村田超声波传感器的基本知识、最新进展、以及在ADAS中的越来越重要的应用。
1. 什么是超声波传感器?
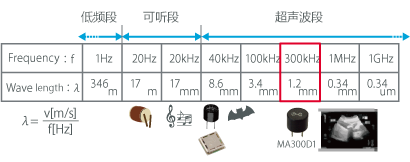
超声波通常是指频率超过人类听觉系统的低频可听范围(0 Hz至20 kHz)的声波。
-
v:音速 346m/s (@25℃) -
f:频率 -
λ:波长
超声波的发声原理是利用压电陶瓷具有根据电压方向膨胀和收缩的特征,将电信号转换为陶瓷振动,通过陶瓷的反复膨胀和收缩让空气振动,并发出超声波。
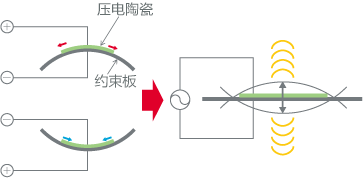
实际使用中,超声波传感器将电信号施加到超声波换能器(发射器),通过膨胀和收缩压电陶瓷,发射超声波;然后,再由接收器接收超声波并转换为用于分析的电信号并加以各种应用。

-
音速会随着弹性模量的增加而增加。音速=弹性模量/密度,液体和固体中的音速比气体更快;
-
空气中的音速受温度的影响。空气中的音速C=331.5+0.6T [m/s],其中,C是空气中的音速,T是气温(℃);
-
由于声阻抗Zo=ρ・C(其中ρ是介质密度、C是介质中的音速),所以,当介质的声阻抗差较大时,反射增加,当声阻抗差较小时,发生透射。

声波在不同介质界面发生反射与透射
不同物体由于组成材料不同,都具有其各自固有的、不同的声阻抗和音速。也就是说,介质中的音速、声阻抗是表示声音传播容易程度的数值。反之,通过发射和收集这些参数,就能用来判断声波说碰到的“障碍物”界面的空间情况。
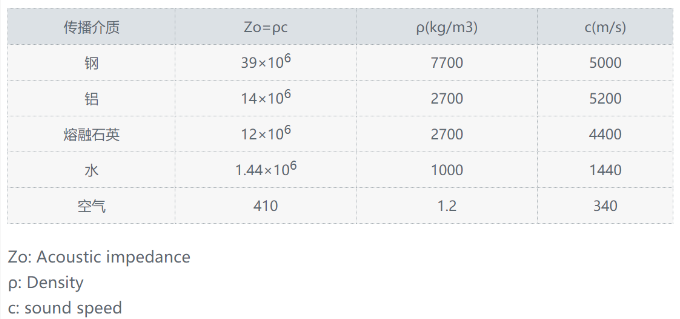
各种介质中的音速和声阻抗
超声波传感器具有从顶部表面开始的圆锥形方向性,将方向性定义为从正面声压到-6dB。与光学传感器相比,方向性更宽,但是具有频率越高则方向性越尖锐的特征。
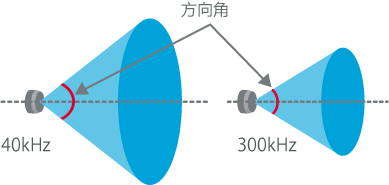
◆ 分辨率:频率越高则分辨率越高。
◆ 衰减:频率越高则衰减越大,到达距离越短。
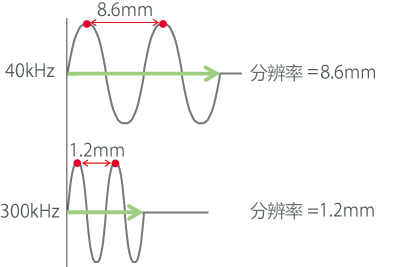
超声波具有传播速度因传播介质而异、方向性和分辨率因频率而异的特性。这些性能会影响测量距离、精度和检测范围。
3. 超声波的应用
比如,距离可以通过测量超声波反射时间来计算:测量从发射开始到接收到反射波为止的时间,然后:时间x音速=到物体的距离(往返)。
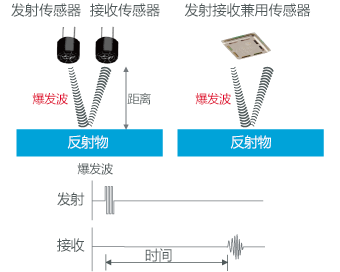
超声波检测距离的原理示意
下面,我们看看超声波传感器在汽车上的应用。
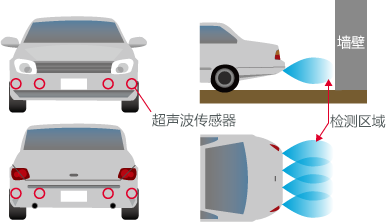
4. 汽车PAS应用
超声波传感器是最早的辅助驾驶应用。汽车的停车辅助系统(PAS)使用超声波传感器测量车辆与障碍物(例如墙壁)的距离,并将接近程度通知驾驶员。
-
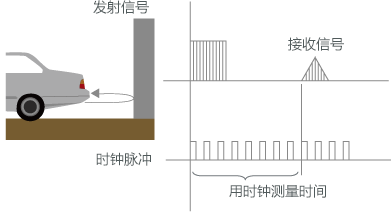
发射脉冲信号,超声波从障碍物反射,根据到接收到反射波为止的时间测量距离。
-
发射脉冲信号时,将发送时钟脉冲,并使用时钟测量时间。
-
反射时间(s) x 音速(340m/s)=到障碍物的距离(往返)
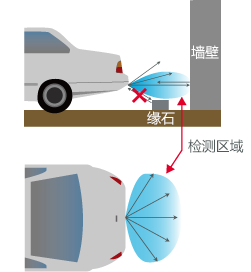
PAS应用所需的特性,不仅是要能够即时检测到后方的墙壁等大面积的障碍,还需要判断“缘石”的影响;另外,车载超声波传感器要尽量以一个装置去覆盖最大的面积,以减少装置数量;
最后,PAS系统还需要能够检测到极端靠近的距离,这对所使用的超声波传感器的方向性能提出更高要求,即垂直方向上较窄,在水平方向上较宽,而余响时间更短。
5. 汽车ADAS应用
自动驾驶Level 3是ADAS技术的关键环节(视频1)。从ADAS Level3开始,车辆就被真正“交给”了软件、算法、和传感器,产品和技术的性能、可靠性和精度举足轻重。而实际上,现有的行业技术能力仍可能带来误差和不精准,不能避免意料之外的路况造成的事故。
而当ADAS进入Level 4(高阶自动驾驶),驾驶员将很少参与驾驶过程,车辆进入全自动的巡航状态,ADAS需要实时监测车辆的周围环境,使用各种传感器,比如雷达、激光雷达、摄像机、超声波传感器。
此时,不仅对单个传感器的性能和品质有非常高的要求,还需要进行软件/算法的组合,通过组合、优化、综合分析各种传感器的数据,扩大检测范围,缩短盲区,提高自主驾驶的安全性。

村田的传感技术和压电陶瓷处理技术,很早即应用在停车辅助系统(PAS),村田的超声波传感器在距离车辆几米范围内发挥监测作用,早已用于自动停车系统,包括低速自动驾驶。

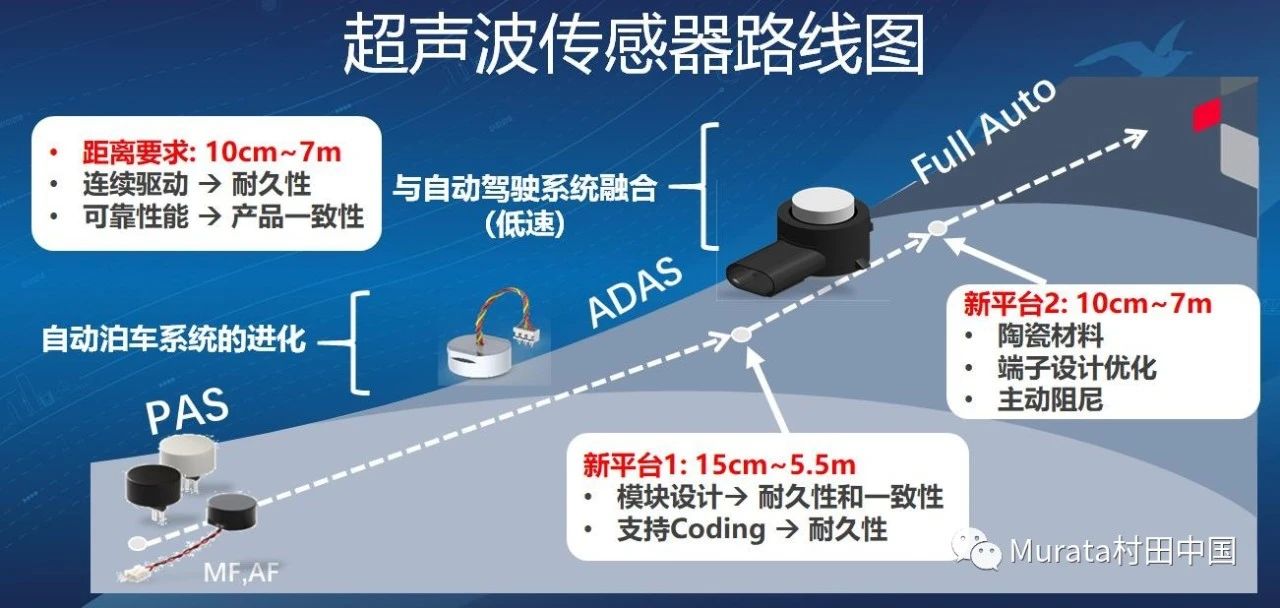
进入高端自动驾驶时代,为了提高安全性,汽车行业对超声波传感器的要求也越来越高,不仅需要提高产品本身的可靠性,扩大检测范围(特别是汽车周围近距离),而且,为了快速检测汽车周围情况,还需要通过Coding技术实现多个超声波探头同时检测周围环境。
为了应对市场需求,实现超声波传感器优异的耐久性,稳定的近距离检测,村田近年来从产品的构造,制程开始进行改善。目标是,单个超声波探头的近距离检测,从目前的25cm缩短到10cm以下。
村田在实现10cm以下的检测上使用了主动阻尼技术,大大提高短距离检测能力。
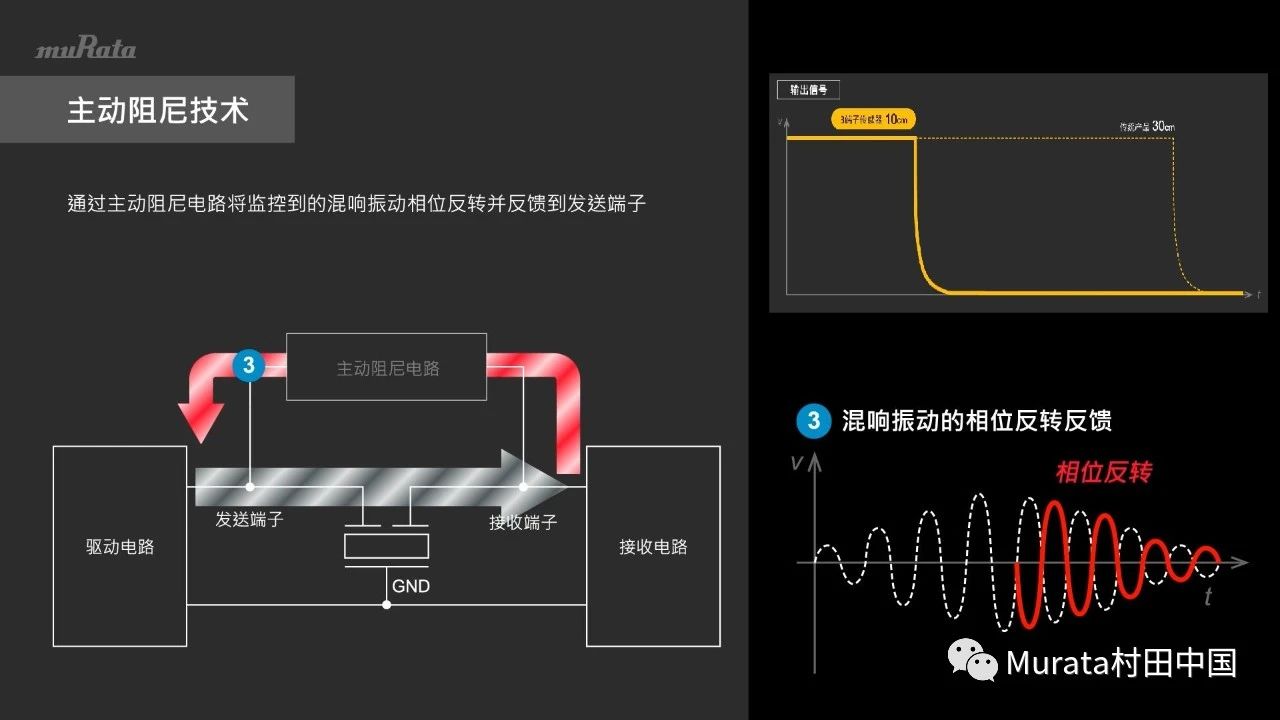
主动阻尼技术提高短距离检测能力(请参考视频2)
通过抑制超声波发射后的余震时间,可以检测到10cm以下距离处反射回来的回波信号。

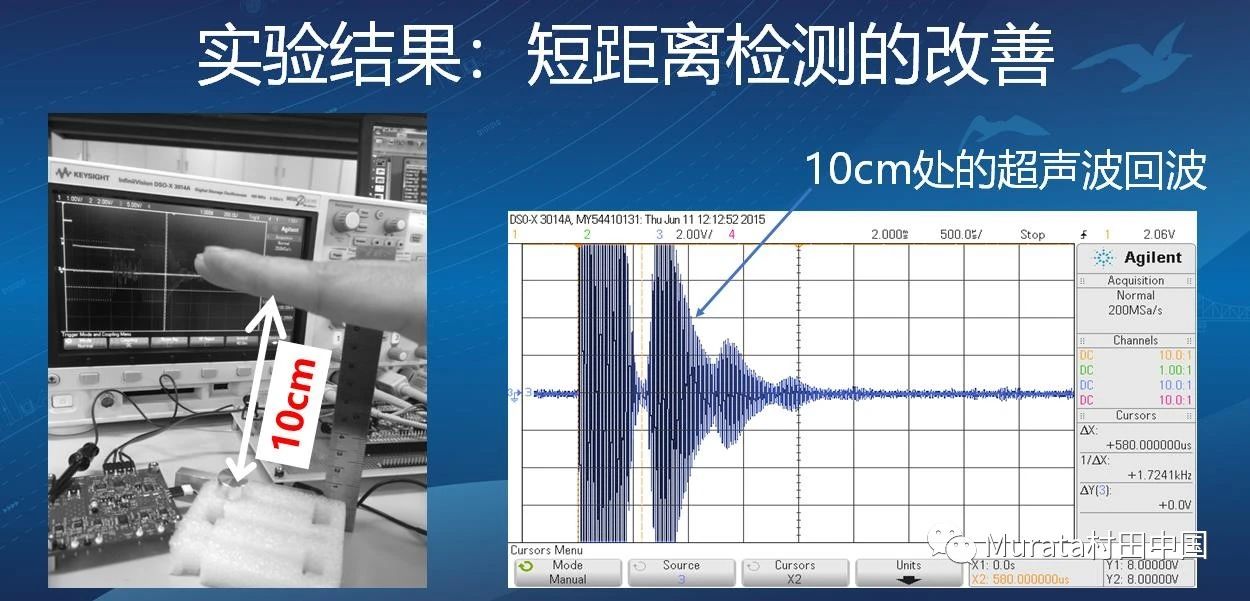
在不久的将来,村田计划向市场提供这种技术的产品。